ページ内移動リンク
ここからヘッダーメニュー
ここからグローバルナビゲーション

ここからローカルナビです
ここから本文です

- ヒューマンインターフェース研究室
- 指導教員:見崎 大悟 准教授
- キーワード: ロボット工学、バーチャルリアリティ、画像認識、ヒューマンインタフェース
- 関連深い科目名:
- 研究室ホームページ:ヒューマンインタフェース研究室HP
ヒューマンインターフェースで直感的に操作できるロボットをつくる。
研究室紹介
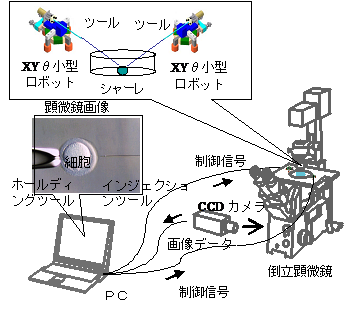
顕微鏡下での受精作業や被災地の救援活動などの複雑な操作を、人間がロボット
を操作しておこなう場合、人間がロボットをより直感的に直接操作できるシステ
ムが必要となります。
ヒューマンインタフェースは、機械(ロボット)と人間が協調して目標を達成するために必要とされており、
21世紀のロボット社会において重要な技術のひとつです。
本研究室では、画像処理技術を基盤としたヒューマンインタフェースをもちいて、マイクロロボットの開発、
レスキューロボットの開発、技能継承のための熟練技術の動作認識などのテーマについて研究をおこなっています